![]()
![]()
![]()
![]()
![]()
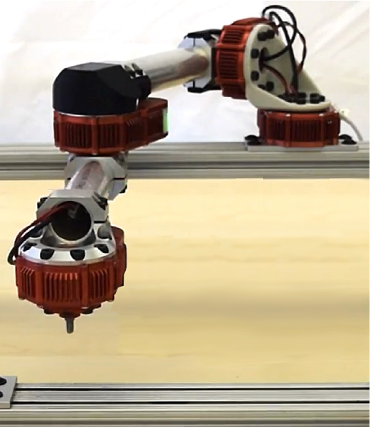
多関節カスタムロボットを簡単構築
HEBI スマートアクチュエータ
トルク制御
位置制御
速度制御
HEBI スマートアクチュエータ
HEBI スマートアクチュエータは様々な構造の高性能カスタムロボットを簡単に製作できる
多機能ロボットモジュールです。
モジュールにはアクチュエータ、減速機、エンコーダに加えて、トルク、位置そして速度制御を
可能にする各種のセンサと3軸の慣性センサを内蔵しており、用途に応じて最適な構造の多関節
ロボットを簡単に短期間で作ることができます。

|
【 特 長 】 ■ オールインワンのコンパクトパッケージ ■ 様々な制御が可能 ・トルク制御 ・位置制御 ・速度制御 ■ 各種センサを内蔵 ■ 直列弾性アクチュエータ(SEA) ■ 優れたモジュラー性 ■ 中空穴構造で容易な連結 |
HEBI スマートアクチュエータは、米国カーネギーメロン大学バイオ |
|
||||
仕様
HEBI スマートアクチュエータには、サイズおよび、アクチュエータの出力に応じて複数のモデルを用意。
異なるモデルを自在に組み合わせ、目的に応じた最適なカスタムロボットを構築することができます。
教育・研究用途から、製造現場での実用ロボットまで、幅広い用途に対応します
| 型名 | T5-1 | T5-4 | T5-9 | T8-3 | T8-9 | T8-16 |
| 外形寸法 | 126mm × 74mm x 34mm (中空穴径 Ø15mm) T5 機械的寸法図 |
126mm × 74mm x 48mm (中空穴径 Ø15mm) T8 機械的寸法図 |
||||
| 本体質量 | 450g | 450g | 150g | 575g | 575g | 575g |
| 最大トルク | 2.5 Nm | 7 Nm | 13 Nm | 7 Nm | 20 Nm | 38 Nm |
| 連続トルク | 1.3 Nm | 4 Nm | 8 Nm | 3 Nm | 8 Nm | 16 Nm |
| 最大回転数 | 90 rpm | 32 rpm | 14 rpm | 84 rpm | 30 rpm | 15 rpm |
| 角度分解能 | 0.005° | 0.005° | ||||
| トルク分解能 | 0.01 Nm | 0.01 Nm | ||||
| バックラッシュ | ±0.25° | ±0.25° | ||||
| 供給電源 | 24-48V DC | 24-48V DC | ||||
| 電流 | 0.5A @ 36V (連続)、1.6A @ 36V (最大) | 1.3A @ 36V (連続)、3.0A @ 36V (最大) | ||||
| 環境温度条件 | -10 ~ 50 ℃ | -10 ~ 50 ℃ | ||||
| 通信 | 2 x 100 Mbps プラスチック光ファイバー (OptoLock®) | 2 x 100 Mbps プラスチック光ファイバー (OptoLock®) | ||||
| センシング | 角度位置(マルチ回転 絶対、±4回転) 角速度 出力トルク 3軸加速度計/3軸ジャイロ 温度 電圧 電流 |
角度位置(マルチ回転 絶対、±4回転) 角速度 出力トルク 3軸加速度計/3軸ジャイロ 温度 電圧 電流 |
||||
| 開発用API | Matlab(Windows / Linux / OS X) ROS(Linux) Python(Windows / Linux / OS X) C/C++(Windows / Linux / OS X) |
Matlab(Windows / Linux / OS X) ROS(Linux) Python(Windows / Linux / OS X) C/C++(Windows / Linux / OS X) |
||||
保護等級 IP67
防水・防塵構造モデル
R-Seriesスマートアクチュエータは、
屋外や劣悪環境下での使用に対応する
密封シールドケースに収められた防水・
防塵モデルです。

| 型名 | R8-3 | R8-9 | R8-16 |
| 外形寸法 | 156mm × 78mm × 51mm (中空穴径 Φ15mm) | ||
| 本体質量 | 670 g | 685 g | 715 g |
| 最大トルク | 7 Nm | 20 Nm | 38 Nm |
| 連続トルク | 3 Nm | 8 Nm | 16 Nm |
| 最大回転数 | 84 rpm | 30 rpm | 15 rpm |
| 角度分解能 | 0.005° | ||
| トルク分解能 | 0.01 Nm | ||
| バックラッシュ | ± 0.25° | ||
| 供給電源 | 24 ~ 48 VDC | ||
| 電流 | 1.3A @ 36V (連続)、3.0A @ 36V (最大) | ||
| 環境条件 | 温度 -10 ~50 ℃、保護等級 IP67 | ||
| 通信 | 2 x 100 Mbps プラスチック光ファイバー (OptoLock®) | ||
| 内蔵センサ | 角度位置 (多回転アブソリュート、±4回転) 角速度 出力トルク 3軸加速度計/3軸ジャイロ 温度 電圧 電流 内圧 |
||
| 開発用API | Matlab(Windows / Linux / OS X) ROS(Linux) C/C++(Windows / Linux / OS X) Python(Windows / Linux / OS X) |
||
HEBI オプション
|
CR1モジュールは、HEBI Roboticsプラットフォームとシームレスに 統合できる密閉型で堅牢な高精細カメラで、保護等級はIP67 または IP69です。 このカメラは、ロボットによる遠隔操作や目視検査アプリケーションに 最適です。 CR-1 インスペクションカメラ - データシート |

|
|
WATTMAN™バッテリーはロボットシステムのために開発された モバイルパワーソリューションです 航空会社の厳しい機内持ち込み要件を満たすほど小型でありながら、 産業用モバイルプラットフォームを駆動するのに十分なパワフルさと スタック性を備えています。 充電状態を遠隔から確認でき、充放電速度を調整し、保管中のショートを 防止する統合制御ボードを備えています。 Wattman バッテリー - データシート |

|
|
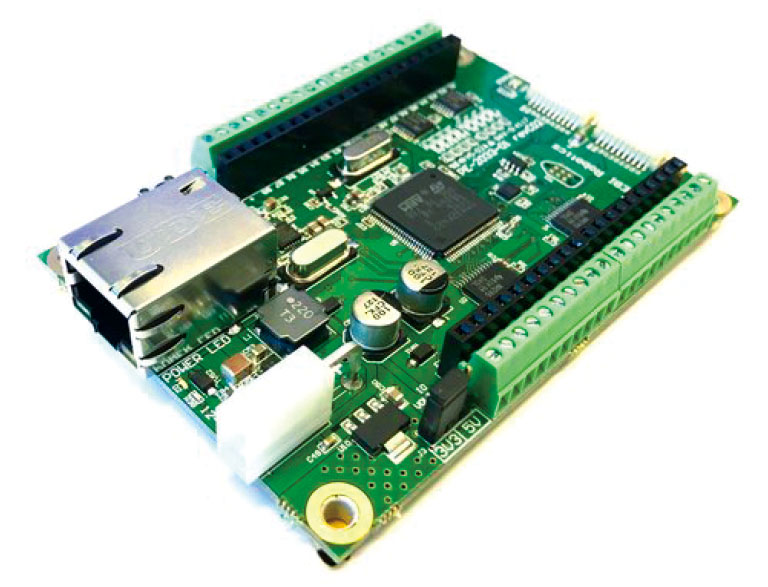
HEBI I/O Boardは、ロードセル、圧力センサ、リミット スイッチなどといったセンサを接続し、HEBI APIを用いて モジュールと一括しての制御を可能にする入出力ボードです。 汎用アナログ・デジタル入力、デジタルおよびPWM出力、 エンコーダ入力が可能です。 |
|
|
位置検出用のパッシブアームの作成に使用できるエンコーダーナックルです。 各2 DoFは±0.1°の精度を持つ連続回転アブソリュートエンコーダで、 HEBIのAPIで完全にサポートされています。 Passive Encoder Knuckles - スペックシート |

|

HEBI ソフトウェア
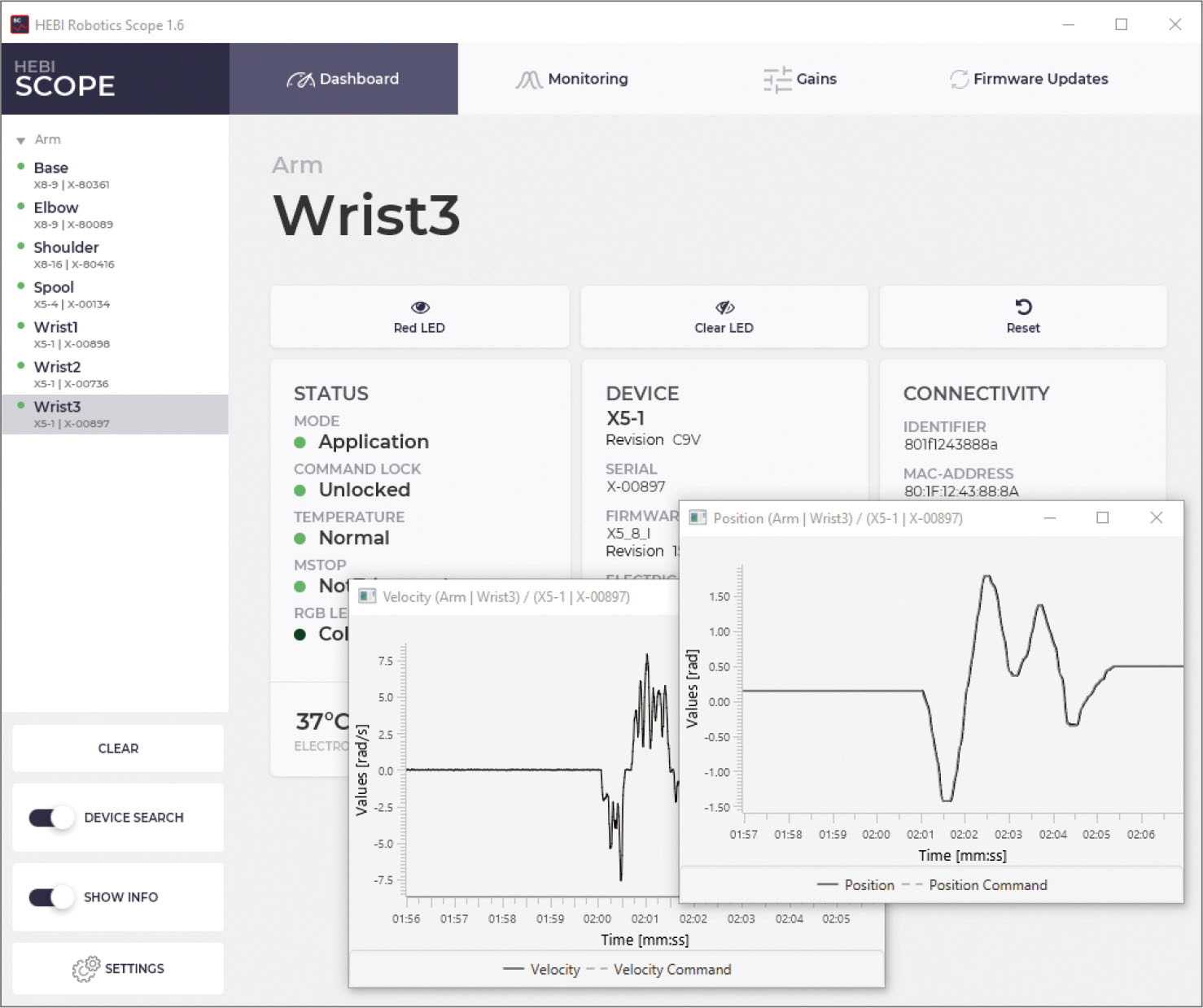 ・フィードバックのリアルタイムグラフ表示
・フィードバックのリアルタイムグラフ表示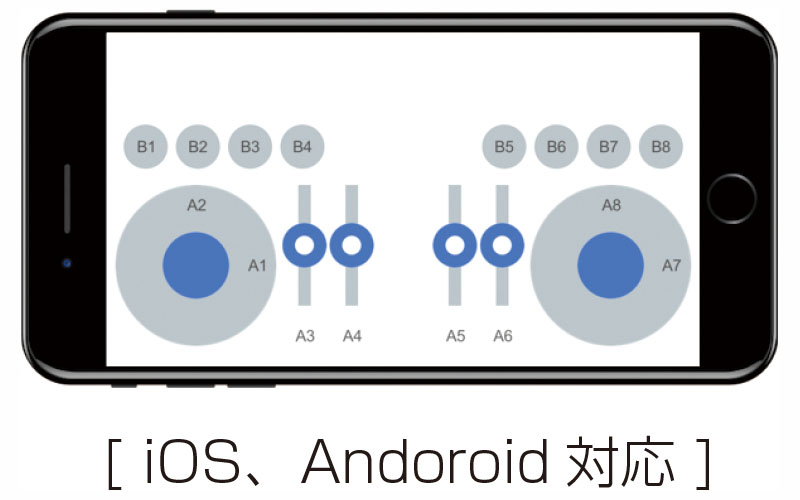 HEBIモジュール制御のためのスマートフォン・
HEBIモジュール制御のためのスマートフォン・ HEBI Robotics社では、様々なプログラミング
HEBI Robotics社では、様々なプログラミングcopyright (C) Nihon Binary Co., Ltd., All rights reserved.